













Amazon購入の3Dプリンタキットの動作検証作業 その1
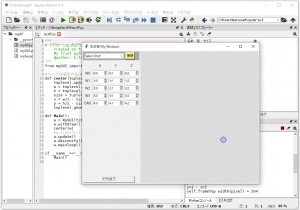
Amazonで販売されている3Dプリンタキットを使ってオープンソースソフトウェア(Marlin、Pronterface等)の動作検証の作業を行います。
今回使用した Amazonで販売されている3Dプリンタキットは次のものです。
www.amazon.co.jp

Amazon.co.jp: Kuman 3dプリンター キット Arduinoに交換 RAMPS 1.4コントローラ...
Amazon.co.jp: Kuman 3dプリンター キット Arduinoに交換 RAMPS 1.4コントローラ+Arduino Mega2560 R3互換ボード+A4988 ドライバ+LCD12864 モジュール 電作キット プリンタセット 2017新版 Arduino Mega 2560 Uno R3とArduino Rep...

【主なパーツ】
CPUボード |
: |
Arduino Mega 2560(どこかの互換品) |
RAMPS 1.4シールド |
: |
RAMPS 1.4互換品 |
ステッピングモータードライバ |
: |
A4988搭載互換品(5個) ヒートシンク付 |
LCDモニター |
: |
REPRAP_DISCOUNT_FULL_GRAPHIC_SMART_CONTROLLER互換品 |
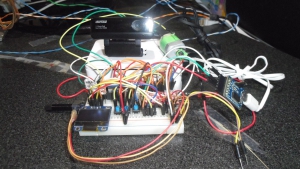
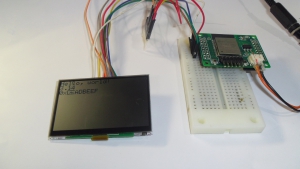
ハードウェアの組み立てと簡単な動作確認
-
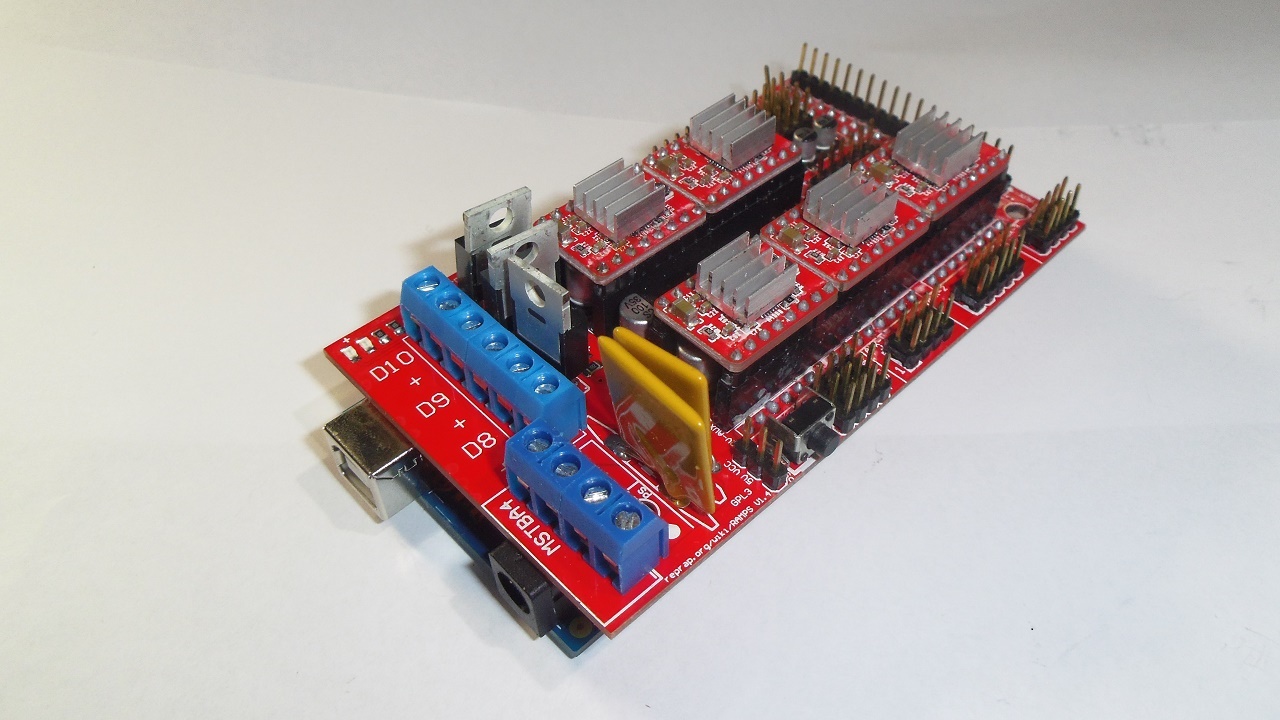
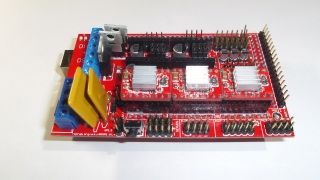
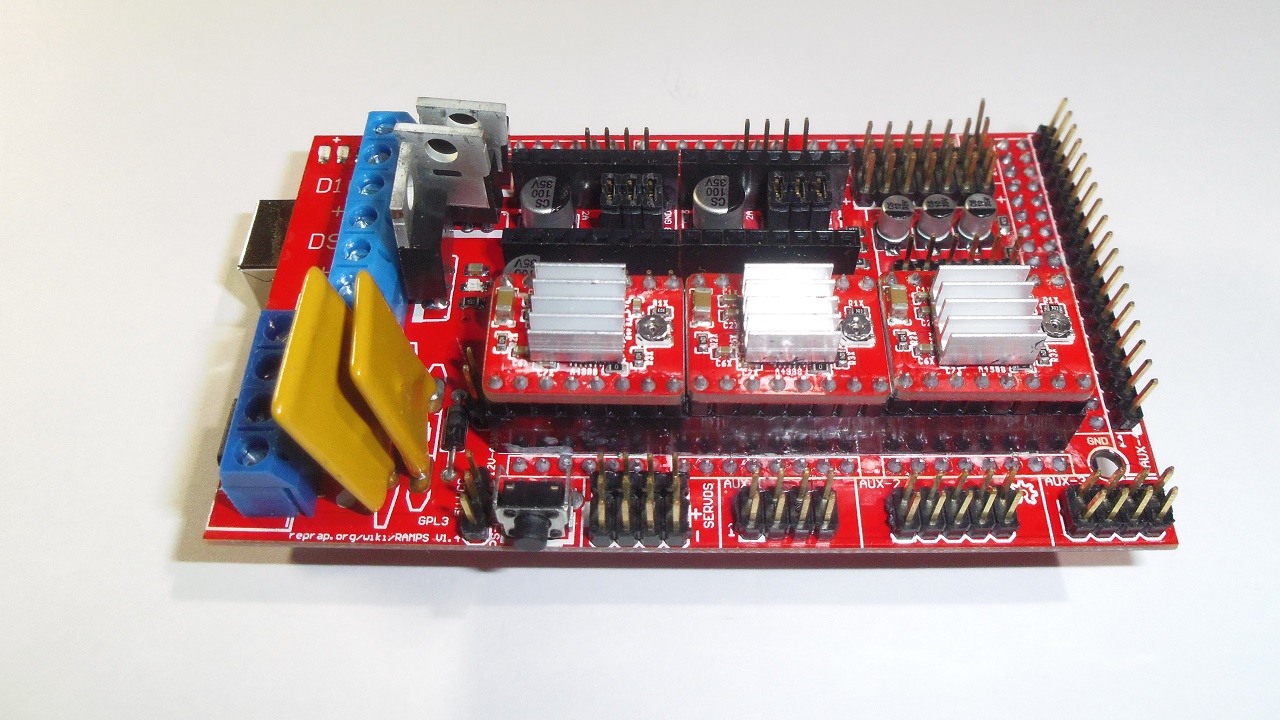
RAMPS1.4シールドにステッピングモータードライバ(A4988)をとりあえず3つ(XYZの3軸分)を組み込む。
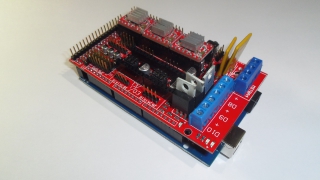
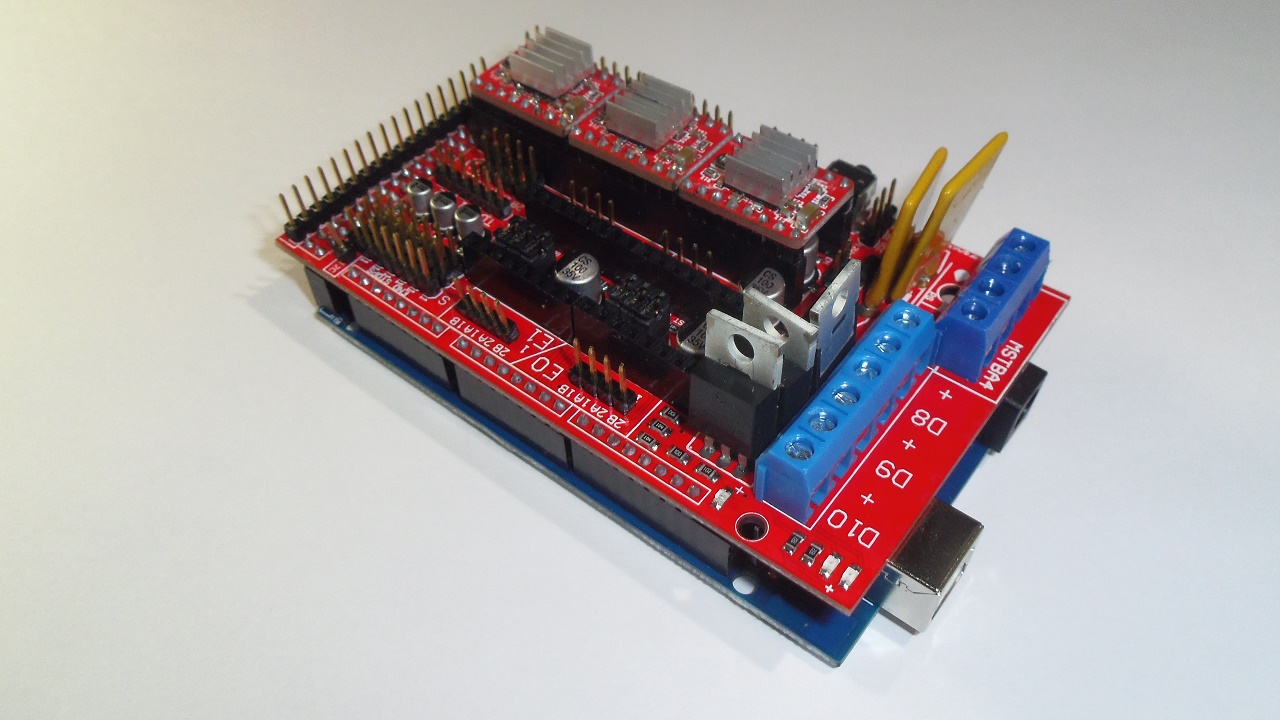
- Arduino Mega 2560(互換品)にRAMPS1.4シールドを組み込む。
- Arduino Mega 2560(互換品)にサンプルのスケッチ(シリアル通信)を書き込んで動くかどうか確認⇒OKでした。
- RAMPS1.4シールドに12V電源を入れてみる。とりあえず問題なし。
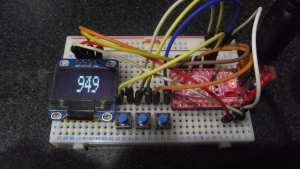
ステッピングモータードライバ(A4988)の調整
次のサイトを参考にステッピングモータードライバ A4988 の電流制限設定を行います。

CNCキットの際にステッピングモータードライバ DRV8825 の際の電流制限と同じ方法でに A4988 の電流制限設定を行います。機材を壊さないようにするためにも必須作業です。
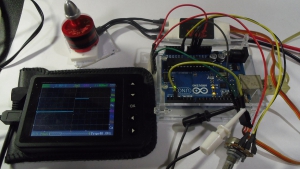
RAMPS 1.4シールドを Arduino Mega 2560 に差して USBケーブルでパソコンに接続して5V電源を供給し、A4988 の可変抵抗を精密ドライバにテスタ(電圧計)の+をワニ口グリップで接続して電圧を計りながら回して調整する。
上記サイトを参考にすると VREF=8 × IMAX × RCS (Rcsはセンスレジスタの値)とのことなので今回使用するステッピングモーター(Kuman Motor 17HD48002H-22B)の定格電流が 1.7A とすると
amazonで購入したKuman製の A4988 は RCS = 0.1Ω (R100の抵抗が搭載されていた)なので
VREF = 8 × 1.7 × 0.1 つまり、VREF = 1.36V ということになる。
今回はメカ機構パーツもなくモーターを回すだけの学習が目的なのでステッピングモーターが回るところまで VREF値を下げて使うことにした。(※電気代の節約もせないかんこともあるので)
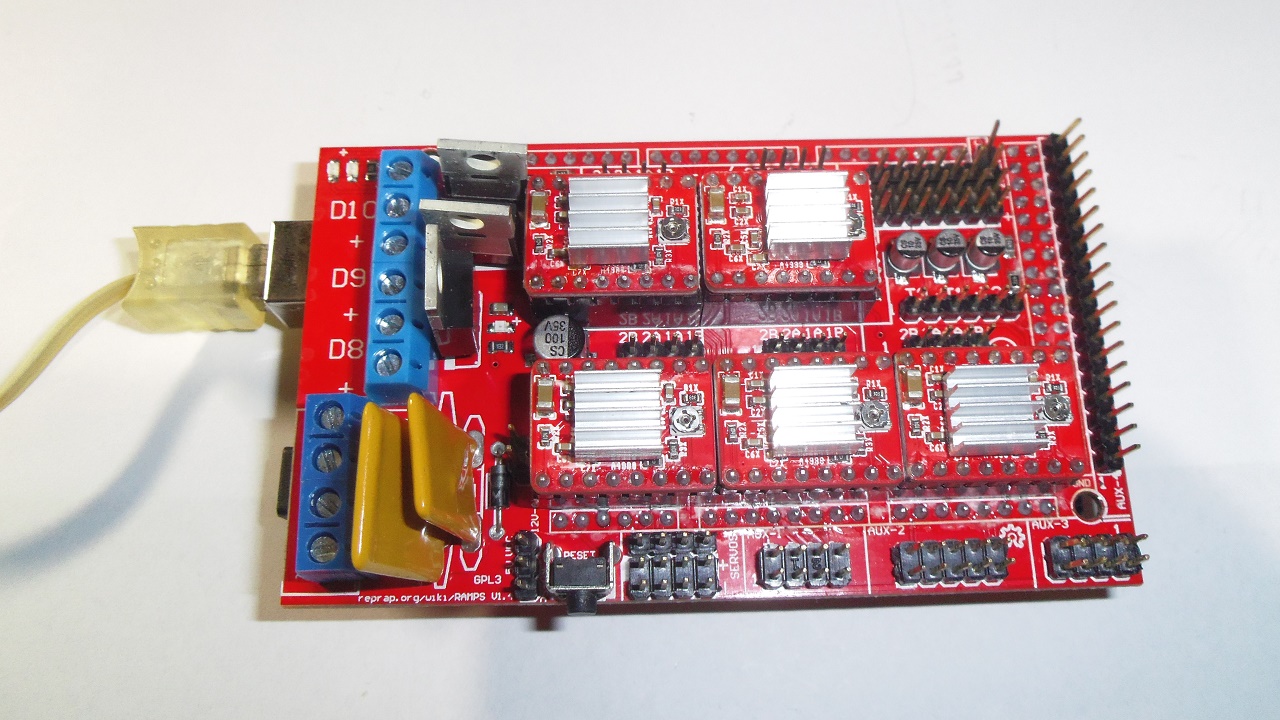
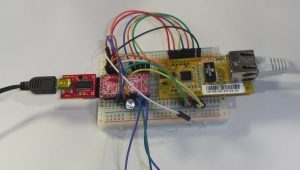
上の写真には3軸(X、Y、Z)の他にE0とE1(エクストルーダー用?)の2つも追加し5軸分の A4988 の調整も行った。また、A4988 は結構熱くなっていたので冷却用のヒートシンクも付けることにしました。
今回はここまで